Motor ZLTECH trifásico 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC para máquina de impresión








Un motor eléctrico de CC sen escobillas (BLDC) é un motor eléctrico alimentado por unha fonte de tensión de corrente continua e conmutada electrónicamente en lugar de por escobillas como nos motores de corrente continua convencionais.Os motores BLDC son máis populares que os motores DC convencionais hoxe en día, pero o desenvolvemento deste tipo de motores só foi posible desde a década de 1960, cando se desenvolveu a electrónica de semicondutores.
Semellanzas BLDC e motores DC
Ambos tipos de motores consisten nun estator con imáns permanentes ou bobinas electromagnéticas no exterior e un rotor con bobinados de bobinas que poden alimentarse con corrente continua no interior.Cando o motor é alimentado por corrente continua, crearase un campo magnético dentro do estator, que atrae ou repele os imáns do rotor.Isto fai que o rotor comece a xirar.
Precísase un conmutador para manter o rotor en rotación, porque o rotor pararíase cando estea en liña coas forzas magnéticas do estator.O conmutador cambia continuamente a corrente continua a través dos enrolamentos e, polo tanto, tamén cambia o campo magnético.Deste xeito, o rotor pode seguir xirando mentres o motor estea alimentado.
Diferenzas entre os motores BLDC e DC
A diferenza máis destacada entre un motor BLDC e un motor DC convencional é o tipo de conmutador.Un motor de corrente continua usa escobillas de carbón para este fin.Unha desvantaxe destes pinceis é que se desgastan rapidamente.É por iso que os motores BLDC usan sensores, xeralmente sensores Hall, para medir a posición do rotor e unha placa de circuíto que funciona como interruptor.As medicións de entrada dos sensores son procesadas pola placa de circuíto que cronometra con precisión o momento axeitado para conmutar mentres o rotor xira.
Parámetros
| Elemento | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Fase | 3 Fase | 3 Fase | 3 Fase | 3 Fase |
| Tamaño | Nema24 | Nema24 | Nema24 | Nema24 |
| Tensión (V) | 24 | 24 | 48 | 48 |
| Potencia nominal (W) | 100 | 200 | 300 | 400 |
| Corrente nominal (A) | 5.5 | 11.5 | 8.3 | 12 |
| Corriente de pico (A) | 16.5 | 34.5 | 25 | 36 |
| Par nominal (Nm) | 0,32 | 0,63 | 0,96 | 1.28 |
| Par máximo (Nm) | 1 | 1.9 | 3 | 3,84 |
| Velocidade nominal (RPM) | 3000 | 3000 | 3000 | 3000 |
| Nº de polos (pares) | 4 | 4 | 4 | 4 |
| Resistencia (Ω) | 0,22 ± 10 % | 0,59 ± 10 % | 0,24 ± 10 % | |
| Inductancia (mH) | 0,29 ± 20 % | 0,73 ± 20 % | 0,35 ± 20 % | |
| Ke (RMS) (V/RPM) | 4,2x10-3 | 4,2x10-3 | 8,3x10-3 | 8,5 x 10-3 |
| Inercia do rotor (kg.cm²) | 0,24 | 0,48 | 0,72 | 0,96 |
| Coeficiente de par (Nm/A) | 0,06 | 0,06 | 0,09 | 0,12 |
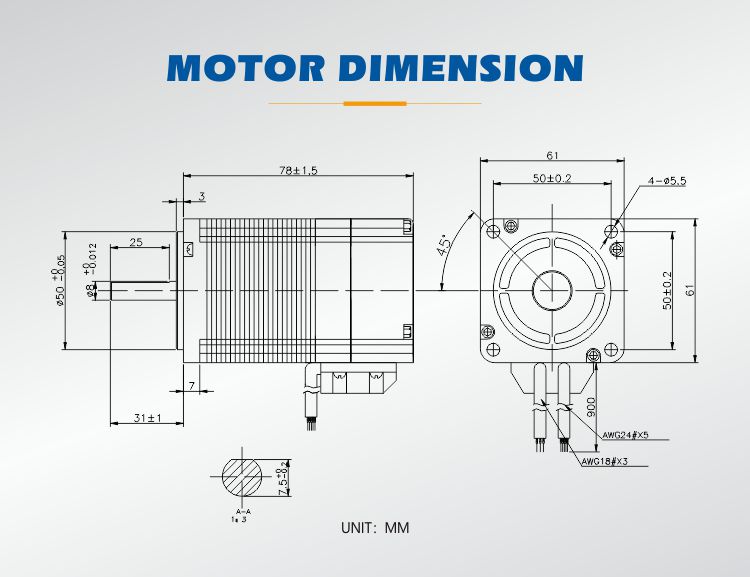
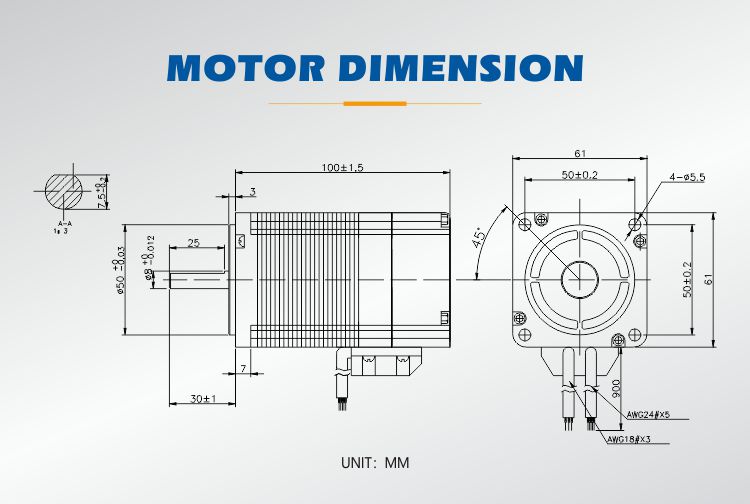
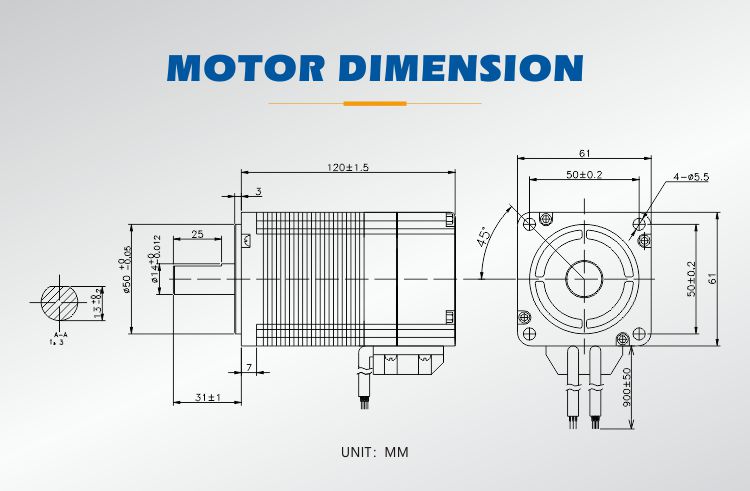
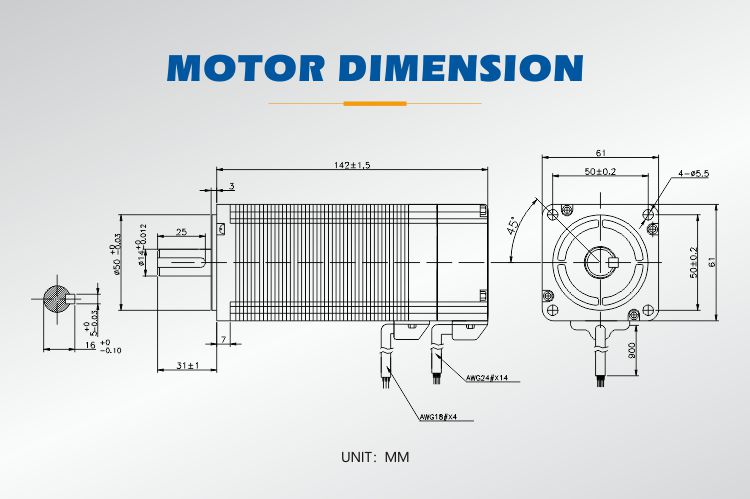
| Diámetro do eixe (mm) | 8 | 8 | 14 | 14 |
| Lonxitude do eixe (mm) | 31 | 30 | 31 | 31 |
| Lonxitude do motor (mm) | 78 | 100 | 120 | 142 |
| Peso (kg) | 0,85 | 1.25 | 1.5 | 2.05 |
| Controlador BLDC adaptado | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Dimensión
Aplicación

Embalaxe

Dispositivo de produción e inspección

Cualificación e Certificación

Oficina e fábrica

Cooperación

Categorías de produtos
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A paso a paso...
-
M4040 ZLTECH 2 fases 12V-40V DC 0.5A-4.0A cepillo...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V paso integrado...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC S...
-

ZLTECH 24V-36V 5A DC eléctrico Modbus RS485 cepillo...
-

ZLTECH 57mm Nema23 24VDC 1000 wrie bucle pechado...





